 English
English
 русский
русский
 Español
Español
 عربى
عربى

News
 Home / News / Industry news / Single Row Ball Bearing vs Cross Roller Slewing Ring Bearing: Which One Should You Choose?
Home / News / Industry news / Single Row Ball Bearing vs Cross Roller Slewing Ring Bearing: Which One Should You Choose? Single Row Ball Bearing vs Cross Roller Slewing Ring Bearing: Which One Should You Choose?
 2026.06.23
2026.06.23
 Industry news
Industry news
Content
- 1 Understanding the Two Bearing Types Before Comparing Them
- 2 Load Capacity: Where the Two Designs Diverge Most Significantly
- 3 Rotational Accuracy and Rigidity Under Load
- 4 Friction, Speed, and Starting Torque Characteristics
- 5 Size, Weight, and Structural Envelope Considerations
- 6 Side-by-Side Comparison of Key Parameters
- 7 Cost and Manufacturing Considerations
- 8 Choosing the Right Bearing for Your Specific Application
Understanding the Two Bearing Types Before Comparing Them
Slewing bearings are large-diameter rolling element bearings designed to support combined loads — axial, radial, and moment forces acting simultaneously — while enabling controlled rotational or oscillating motion. They are found in cranes, excavators, wind turbines, robotic joints, medical imaging systems, and radar platforms. Within the broad slewing bearing family, single row ball slewing bearings and cross roller slewing ring bearings represent two fundamentally different design philosophies, each with a distinct set of performance characteristics that make them suited to different classes of application.
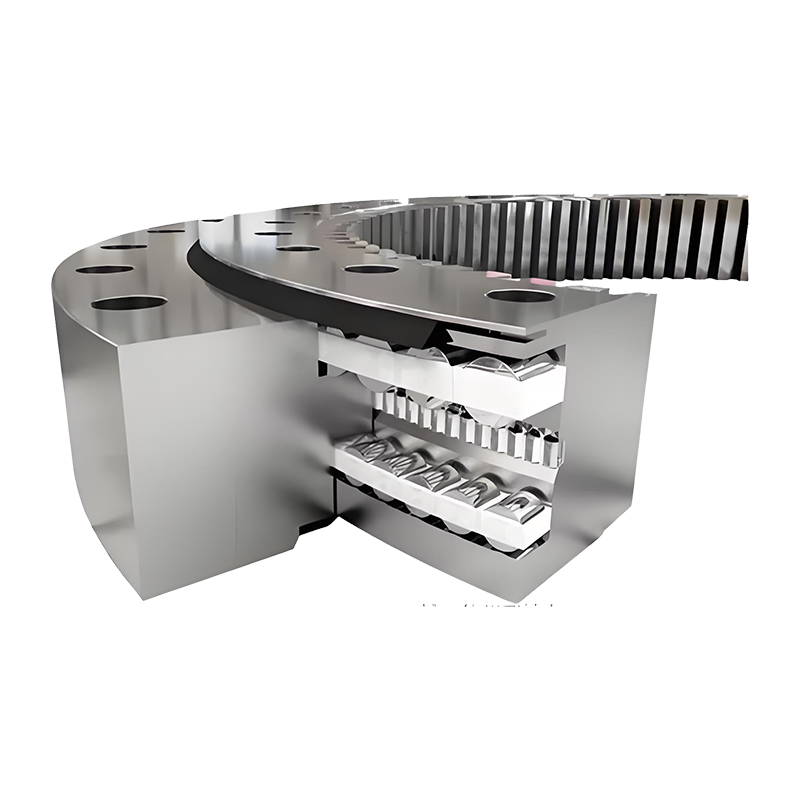
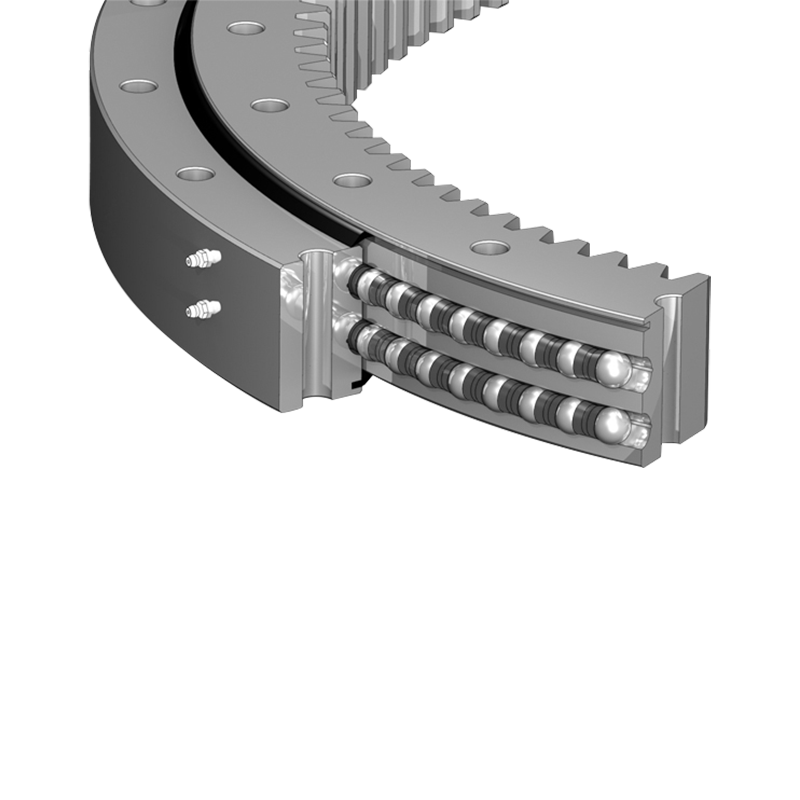
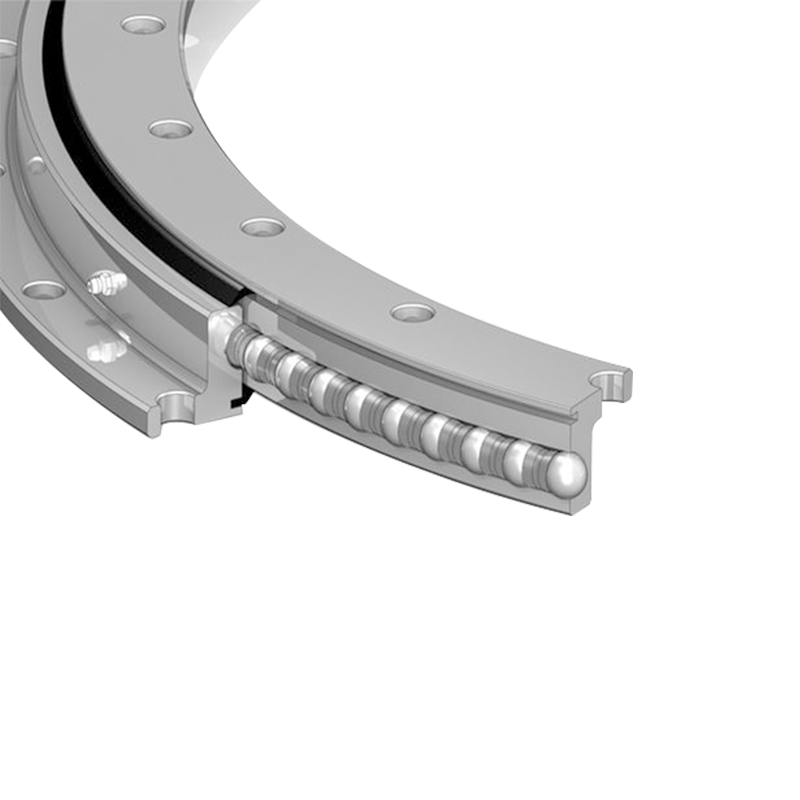
A single row ball slewing bearing uses a single raceway containing a row of steel balls arranged in a circular path between inner and outer rings. The balls make point contact with the raceways, which gives them certain advantages in low-friction rotation but also limits their load-carrying capability relative to their size. A cross roller slewing ring bearing, by contrast, uses cylindrical rollers arranged in an alternating 90-degree crossed pattern within a single raceway. Each roller makes line contact with the raceway surfaces, and because adjacent rollers are oriented perpendicularly, the bearing can simultaneously carry axial loads from both directions, radial loads, and overturning moment loads within a remarkably compact envelope. Understanding these structural differences is the starting point for any meaningful comparison.
Load Capacity: Where the Two Designs Diverge Most Significantly
Load capacity is arguably the most decisive factor when selecting between these two bearing types, and it is the area where their differences are most pronounced. Single row ball slewing bearings rely on point contact between each ball and the raceway. Point contact distributes the applied load over a very small area, resulting in high Hertzian contact stress under heavy loading. While the ball-raceway geometry can be optimized through contact angle selection — typically between 45° and 90° for four-point contact designs — the fundamental physics of point contact imposes an upper ceiling on dynamic and static load ratings for a given bearing diameter.
Cross roller slewing ring bearings benefit from line contact between each cylindrical roller and the flat or slightly crowned raceway. Line contact spreads the load along the entire effective length of the roller, dramatically reducing contact stress for the same applied load. This translates directly into higher static and dynamic load ratings compared to a same-diameter ball slewing bearing. For applications involving heavy overturning moments — such as the boom pivot on a crane, the turntable of an excavator, or the elevation axis of a large antenna — cross roller bearings deliver substantially greater moment rigidity and load capacity without requiring a larger outer diameter.
In quantitative terms, a cross roller slewing ring bearing can typically carry moment loads two to four times higher than a single row ball slewing bearing of equivalent outside diameter. This is a critical advantage in space-constrained designs where increasing bearing diameter is not an option.
Rotational Accuracy and Rigidity Under Load
For applications that demand high positional accuracy — such as robotic arm joints, precision turntables, medical CT scanner gantries, and telescope mounts — rotational accuracy and stiffness under load are equally important as raw load capacity. This is another area where cross roller slewing ring bearings demonstrate a clear advantage over single row ball designs.
The crossed roller arrangement, with alternating rollers oriented at 90 degrees, creates a highly isotropic stiffness distribution. Any applied moment load is resisted by rollers on both sides of the load vector simultaneously, which minimizes tilting deflection of the inner ring relative to the outer ring. This results in lower axial and radial runout under load — critical metrics for precision systems. Many cross roller slewing ring bearings are manufactured to ISO accuracy classes P5 or better, with axial runout specifications below 0.02 mm on medium-sized rings.
Single row ball slewing bearings, while serviceable in moderate-accuracy applications, exhibit greater elastic deflection under moment loading due to the lower stiffness of point contact. For general industrial machinery where positional tolerances are loose — such as material handling turntables or simple rotating platforms — this is rarely a problem. However, for precision indexing or positioning applications, the additional stiffness of the cross roller design is difficult to substitute.
Friction, Speed, and Starting Torque Characteristics
The rolling element geometry that gives cross roller bearings their superior load capacity and stiffness also introduces a trade-off in friction characteristics. Cylindrical rollers in a crossed arrangement generate slightly higher friction than balls rolling in a conventional raceway, primarily because line contact creates more rolling resistance and because the alternating orientation of adjacent rollers requires precise roller end guidance to prevent skewing. This results in somewhat higher running torque and starting torque in cross roller slewing rings compared to equivalent ball slewing bearings of the same diameter.
Single row ball slewing bearings, with their inherently lower rolling friction from point contact and the ability of balls to self-orient, offer lower starting and running torque. This makes them preferable in applications where minimizing drive motor power is a priority, or in continuously rotating systems where accumulated frictional heat must be managed. Examples include solar tracker drives, simple rotating conveyors, and light-duty rotating stages driven by small servo motors.
With regard to maximum rotational speed, single row ball slewing bearings are generally capable of higher speeds than cross roller designs of the same size. The point contact and self-aligning characteristic of balls allows operation at peripheral speeds that would cause unacceptable heat generation or roller skewing in a crossed roller arrangement. For most slewing bearing applications — which typically operate at very low rotational speeds of a few revolutions per minute — this distinction is academic. However, in continuously rotating positioning systems, it can influence design decisions.
Size, Weight, and Structural Envelope Considerations
One of the most compelling practical advantages of cross roller slewing ring bearings is their ability to achieve high load ratings within a very compact cross-section. The crossed roller design allows both rings to be made thinner while still maintaining high structural rigidity, which reduces the overall height and weight of the bearing assembly. This compactness is particularly valuable in robotic systems, where every kilogram of added mass at a joint reduces the effective payload capacity of the robot, and in medical equipment, where compact gantry designs improve patient access and system ergonomics.
Single row ball slewing bearings are inherently larger in cross-section relative to their load ratings because the point contact demands a larger number of balls or larger ball diameters to achieve comparable capacity. For the same load rating, a single row ball slewing bearing will typically have a larger outer diameter or greater height than a cross roller equivalent. In applications where space is not constrained and cost is the primary concern, this difference matters less. But in engineered systems with tight envelope constraints, the compactness of the cross roller design is a decisive advantage.
Side-by-Side Comparison of Key Parameters
| Parameter | Single Row Ball Slewing Bearing | Cross Roller Slewing Ring Bearing |
| Contact Type | Point contact | Line contact |
| Axial Load Capacity | Moderate | High (both directions) |
| Moment Load Capacity | Moderate | Very High |
| Rotational Accuracy | Standard | High (P5 or better) |
| Rigidity Under Moment | Lower | Higher |
| Running Friction | Lower | Slightly Higher |
| Compact Cross-Section | Moderate | Excellent |
| Maximum Speed | Higher | Lower |
| Unit Cost | Lower | Higher |
| Typical Applications | Cranes, conveyors, solar trackers | Robotics, medical, precision systems |
Cost and Manufacturing Considerations
Cost is a practical reality in any engineering procurement decision, and here the two bearing types differ substantially. Single row ball slewing bearings are considerably less expensive to manufacture than cross roller slewing ring bearings of comparable size. The ball raceway geometry is simpler to machine, balls are a commodity rolling element available in large quantities at low cost, and the assembly process is straightforward. This makes single row ball slewing bearings the economical choice for high-volume, cost-sensitive applications where load and precision requirements are moderate.
Cross roller slewing ring bearings require precision grinding of flat roller raceways to very tight tolerances, and the assembly process — inserting alternately oriented rollers with spacers to maintain their angular position — is more labor-intensive and demands skilled assembly technicians. The rollers themselves must be ground to tighter diameter and cylindricity tolerances than balls used in equivalent slewing bearings. These manufacturing demands drive up the unit cost significantly, sometimes by a factor of three to five compared to a ball slewing bearing of the same bore diameter.
For capital equipment where the bearing cost is a small fraction of total system cost — such as a precision robotic cell or a medical imaging system — the premium for a cross roller bearing is easily justified by the performance gains. For high-volume commodity applications such as agricultural machinery or basic material handling systems, the cost premium is difficult to recover and the ball slewing bearing remains the rational choice.
Choosing the Right Bearing for Your Specific Application
The decision between a single row ball slewing bearing and a cross roller slewing ring bearing should be driven by a structured analysis of application requirements rather than cost alone. The following criteria provide a practical framework for selection:
- Heavy overturning moments or combined loads: Choose cross roller slewing ring bearings when the application imposes significant moment loads, particularly if both axial directions must be supported simultaneously within a compact envelope.
- High positional accuracy required: Specify cross roller bearings for robotics, precision indexing tables, medical gantries, and optical systems where axial and radial runout directly affects system performance.
- Low friction and drive efficiency priority: Specify single row ball slewing bearings where minimizing starting torque or running torque is important, such as in solar tracking systems driven by small actuators.
- Cost-sensitive, moderate-load applications: Single row ball slewing bearings are the appropriate and economical choice for general-purpose rotating platforms, light cranes, and agricultural machinery where loads are predictable and tolerances are loose.
- Space and weight constraints: When the bearing envelope is strictly limited and performance cannot be compromised, cross roller slewing ring bearings deliver the highest load rating per unit of cross-sectional area of any single-row slewing bearing design.
Consulting with bearing manufacturers during the early design phase — rather than treating bearing selection as a late-stage procurement task — allows the load analysis, accuracy requirements, and envelope constraints to be properly balanced against available bearing options. Both single row ball and cross roller slewing bearings are mature, well-supported product families with extensive published load rating data, and making the right choice between them is primarily a matter of applying the right engineering criteria to the specific demands of the application at hand.


Jiangsu Manchen Transmission Technology Co., Ltd. excels in creating custom, reliable, and precise slewing bearings for diverse industries, continuously innovating to meet the highest standards and seeking collaborative opportunities. Reliable and steady slewing bearings supplier in China.
Product links
Contact Us
-
Address:No. 8, Nanqiu Road, Huangtu Town, Jiangyin City,China
-
Tel:+86-13646122221
-
Phone:+86-18796936198
-
WhatsApp:+86 18796936198
-
E-mail:hedy@slewingbearingcn.com
-
E-mail:ma@slewingbearingcn.com
-
E-mail:vena@slewingbearingcn.com
