 English
English
 русский
русский
 Español
Español
 عربى
عربى

News
 Home / News / Industry news / How does the gear ratio in vertical internal gear slewing drives influence the torque and speed output for different machinery or systems?
Home / News / Industry news / How does the gear ratio in vertical internal gear slewing drives influence the torque and speed output for different machinery or systems? How does the gear ratio in vertical internal gear slewing drives influence the torque and speed output for different machinery or systems?
 2025.04.30
2025.04.30
 Industry news
Industry news
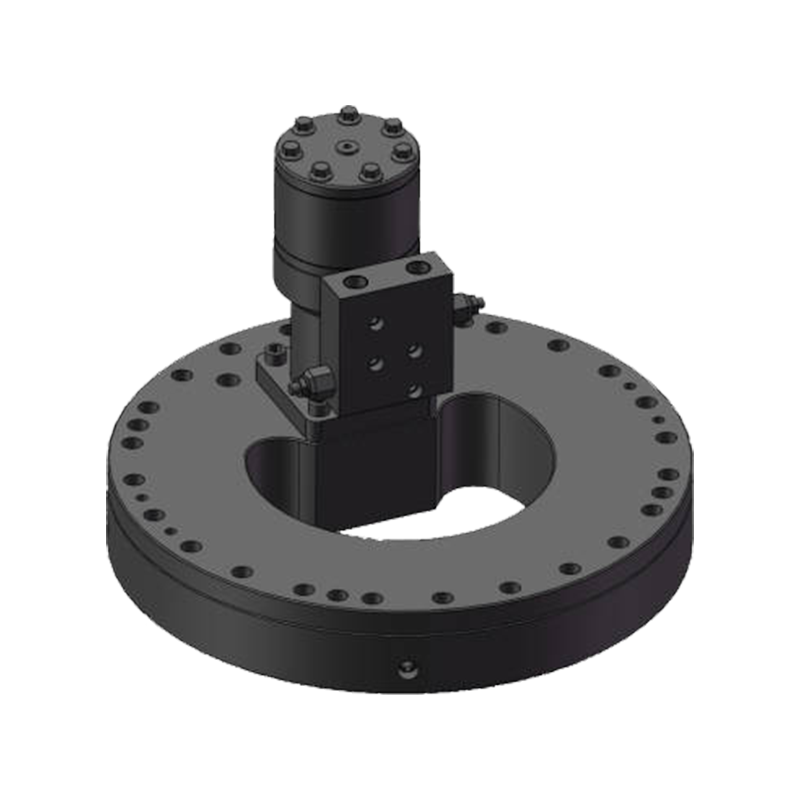
The gear ratio in vertical internal gear slewing drives plays a critical role in determining both the torque and speed output for machinery or systems. Here's how the gear ratio influences these factors:
1. Torque Output
Gear Ratio and Torque: The gear ratio directly impacts the torque multiplication in the system. A higher gear ratio (larger ratio of the driven gear to the driving gear) results in greater torque output at the cost of speed reduction. This is because the torque is inversely proportional to the gear ratio — as the gear ratio increases, the torque is amplified, allowing the system to handle heavier loads.
Example: In a vertical internal gear slewing drive with a higher gear ratio, the driving motor or input force will be converted into more torque to move the load. This is especially useful for machinery like cranes, excavators, or turntables, which need to exert large amounts of force to lift or rotate heavy loads.
2. Speed Output
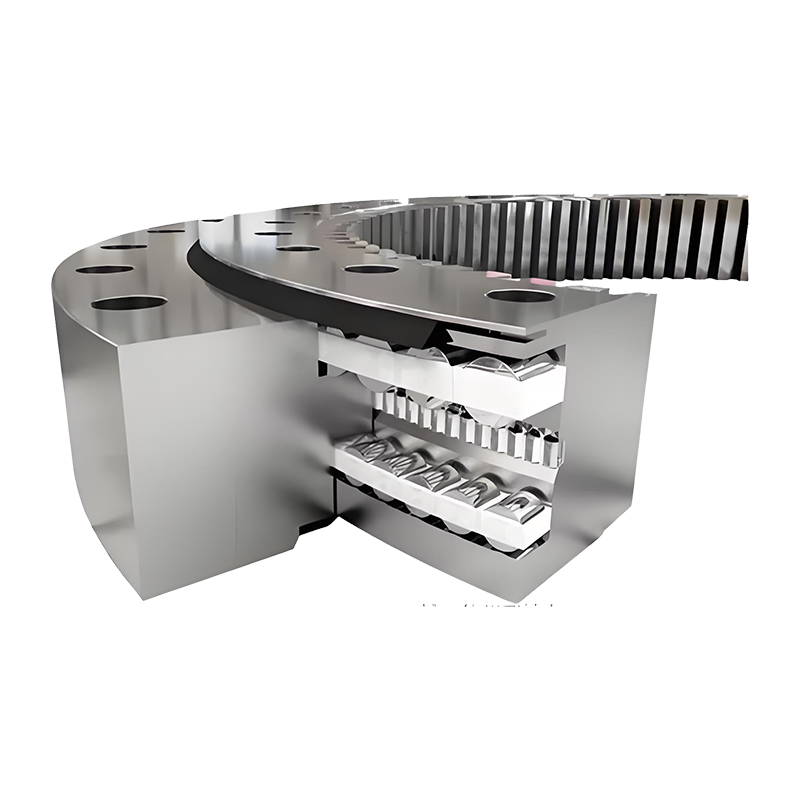
Speed Reduction: The gear ratio also affects the output speed of the slewing drive. A higher gear ratio typically results in a slower output speed because more gear teeth are engaged, slowing the rotation of the driven gear relative to the driving gear. Conversely, a lower gear ratio increases the output speed by reducing the number of teeth engaged, leading to a faster movement of the output shaft.
Example: For applications requiring precision and slow, controlled movements (such as in turntables, telescopic booms, or heavy-duty lifting), a high gear ratio is preferred because it reduces the speed of rotation, providing more control over the movement. On the other hand, systems that require faster rotational speeds might benefit from a lower gear ratio.
3. Balancing Torque and Speed
Torque vs. Speed: There is an inherent trade-off between torque and speed in the design of slewing drives. A high gear ratio will result in slower speeds but higher torque, which is beneficial for heavy lifting or high-torque applications. In contrast, a low gear ratio increases speed but reduces the torque, which might be suitable for lighter loads or applications requiring rapid rotation.
Application Specificity: For example, in a wind turbine, where precise adjustments are needed for the rotor to face the wind, a higher gear ratio in the vertical internal gear slewing drive would be ideal, as it provides slow and controlled movements with high torque. In robotic arms or precision turntables, a lower gear ratio might be chosen for quicker and smoother rotational motion, albeit with less torque.
4. Load Handling and Efficiency
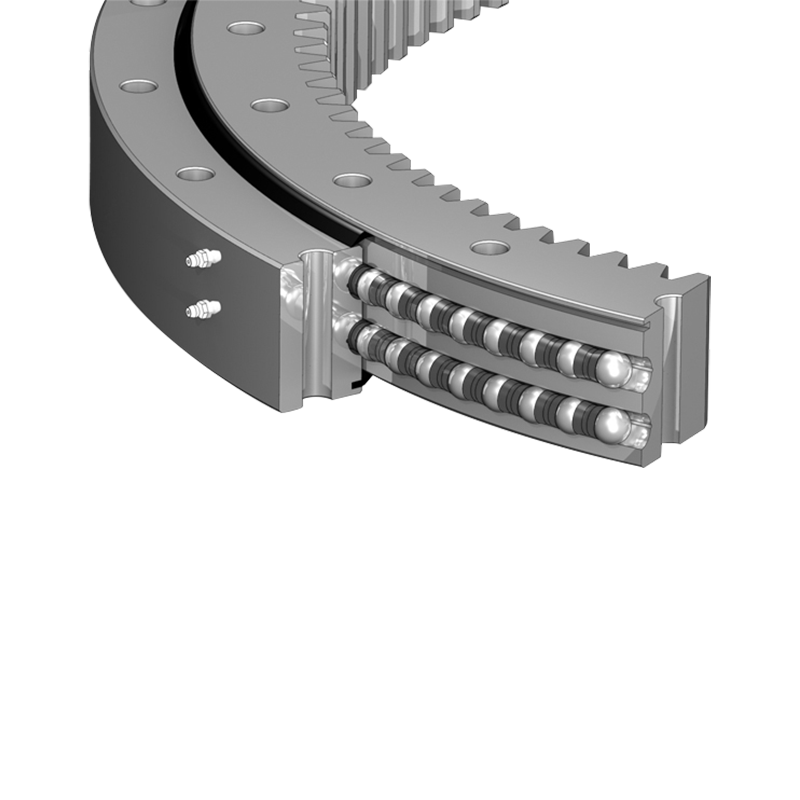
Load Distribution: The higher the gear ratio, the better the system can handle heavy loads, as more torque is available to move the load. However, at higher gear ratios, efficiency can decrease due to increased friction and mechanical losses in the gears. In contrast, a lower gear ratio may offer more efficient operation at the expense of reduced torque capability.
Optimal Gear Ratio Selection: Selecting the correct gear ratio for a particular vertical internal gear slewing drive is crucial for balancing torque demands (heavy lifting, slow movements) with speed requirements (fast movements, precision). This involves considering the mechanical characteristics of the machinery and the expected operational environment (e.g., load sizes, rotational speed, frequency of operation).
5. Dynamic Behavior
Motor and Gear Compatibility: The gear ratio also affects how the motor power is transferred. A higher gear ratio requires the motor to operate at higher input speeds (to achieve the desired slow output speed), which can influence the motor size and type used. In contrast, a lower gear ratio allows for a more direct transfer of motor power with less reduction in speed, which could require a different motor configuration.


Jiangsu Manchen Transmission Technology Co., Ltd. excels in creating custom, reliable, and precise slewing bearings for diverse industries, continuously innovating to meet the highest standards and seeking collaborative opportunities. Reliable and steady slewing bearings supplier in China.
Product links
Contact Us
-
Address:No. 8, Nanqiu Road, Huangtu Town, Jiangyin City,China
-
Tel:+86-13646122221
-
Phone:+86-18796936198
-
WhatsApp:+86 18796936198
-
E-mail:hedy@slewingbearingcn.com
-
E-mail:ma@slewingbearingcn.com
-
E-mail:vena@slewingbearingcn.com
